
SauRo Akıllı Araba bir Eğitim ve Gömülü Sistem Tanıtım Projesidir.
Özet
Bu proje bir SauRo eğitim projesi olarak gerçekleştirilmiş ve ürünün üniversite öğrencilerine gömülü sistemin tanıtımı için kullanılacağı ön görülmüştür. Bu kapsamda Android işletim sistemi yüklü akıllı telefonlar için uygulama geliştirilmiştir. Telefon hareketi algılanarak RC-Jip ‘e (oyuncak jip) bluetooth aracılığıyla komutlar gönderilerek aracın hareketi sağlanmıştır. Çarpma korumalı, kademeli yön ve hız kontrollü, bir araç geliştirilmiştir. Stant görevlisi yetki vermeden yani RFID (Öğrenci kimlik) kartını aracın üzerinde bulunan RFID kart okuyucusuna okutmadan araç ziyaretçi (öğrenci) tarafından kullanıma geçmeyecek şekilde tasarlanmıştır.
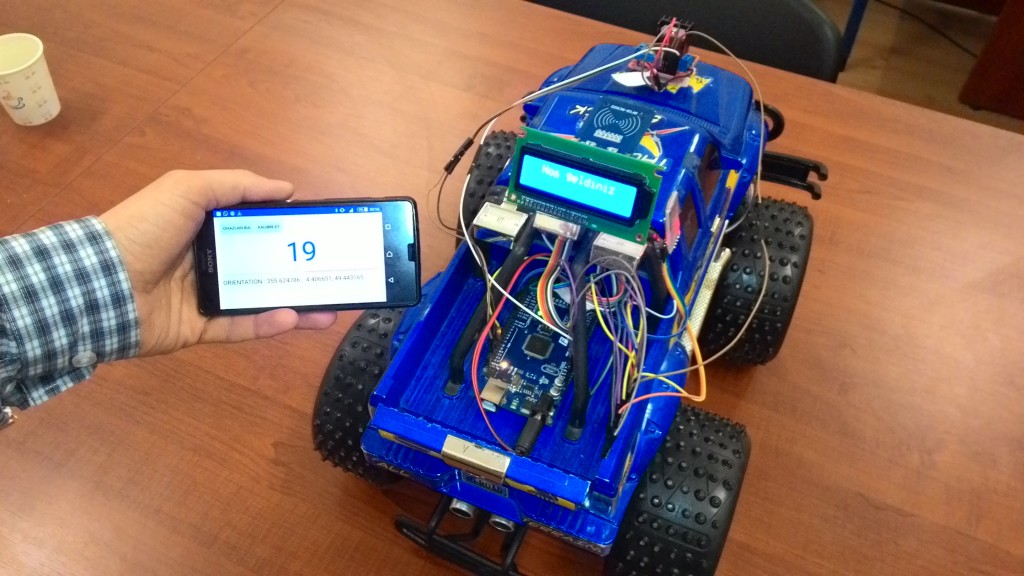
Aracın ve Uygulamanın Görüntüsü
Üretilme Sebebi
Araç, Sakarya Üniversitesi Elektrik elektronik topluluğu olarak eğitim faaliyetlerimize farklı bir bakış açısı getirmek amacıyla başlatılan eğitim projesi kapsamında üretilmiştir. Üniversite öğrencilerine gömülü sistemin tanıtımı amacıyla stantlarda kullanılmak üzere tasarlanmıştır.
Kapsam
Uygulama projesi kapsamı belirl enirken üretilecek ürünün gömülü sistemin tanıtımı için kullanılacağı göz önünde bulundurulmuştur. Bu amaçla günümüz üniversite gençliğine hitap edeceğini düşündüğümüz, stantlarımızda kişilerin kendi akıllı telefonlarıyla kullanabilecekleribir RC araç üretilmiştir.

Üst Soldan itibaren: RFID, Bluetooth, Lipo Pil
Orta Soldan itibaren: Ultrasonik Sensor, Servo Motor, Arduino Mega 2560, LCD, DC Motor, Ultrasonik Sensor
Alt Soldan itibaren: Motor Sürücü
Gömülü sistem eğitimi Arduino ü zerinden verildiği için Merkezi Yönetim Birimi olarak Arduino Mega 2560 Kartı yani ATmega 2560 ter cih edilmiştir. Bunun yanı sıra:
Donanımsal olarak ,
- Neredeyse her akıllı telefonda bulunan bluetooth modülü sayesinde kontrol edilebilen bir RC araç geliştirilmiştir. Bluetooth iletişimi için HC06 modülü kullanılmış ve B u modülle AT komutları kullanılarak ay arlar yapılmış ve Kullanıcı bilgileri elde edilmiştir.Donanımsalserial ile haberleştirilmiş akıllı tel efondan gelen hareket komutları modül aracılığı yla alınıpArduino megadaişlenmiştir.
- Stantlarda tanıtım esnasında görevlinin kontrolünü kolaylaştırmak amacıyla RFID (RFID- RC522) modülü kullanılm ıştır. Üniversite kimlikleri sayesinde stant görevlileri yetkilendirilmiştir.
- Ekip üyelerinden birine a it olan RC-Jipin arka motor haricindeki tüm aksam sökülmüş ve Şekil 2’de ki modüller monte edilmiştir.
- Aracın üzerinde bulunan DC yön motoru Servo motor ile değiştirilmiştir. Bu sayede kademeli bir dönüş sağlanmıştır.
- L298N Motor sürücü entegresi içeren sürücü kartı kullanılarak aracın kendi DC motoruna kademeli ileri-geri hareket özelliği kazandırılmıştır.
- 2 Adet HC-SR04Ultrasonik mesafe sensoru aracın ön ve arkasına 1 adet olmak üzere yerleştirilmiştir. Testler sonucunda aracın çarpmadan kullanılabilmesi için uygun mesafeler tespit edildi. Mesafe ölçümleri doğrultusunda kumandadan bağımsız çarpmayı önleyici kontroller gerçekleştirilmiştir.
- LCD panel kullanılarak aracın durumu hakkında bilgi verilmiştir.
- Akıllı telefonların pozisyon bilgisini elde edebilmek için telefonlarda bulunan sensorler kullanılmıştır.
Yazılımsal olarak,
- Akıllı telefon (Android işletim sistemli) tarafında sensorler yardımıyla telefonun Y ve Z düzlemindeki derecesi algılanarak aracın hareketi için komutlar gönderecek yazılım geliştirilmiştir. Bu yazılım sayesinde RC aracımıza on kademe sağa, on kademe sola

Mobil cihazın X,Y,Z ordinat sistemindeki görüntüsü
olmak üzere yön verilmiştir. Yine onar kademe olmak üzere ileri ve geri hız ayarı yapılabilmektedir.

- Ekip çalışmalarını kolaylaştıran Uzak Git Deposu kullanılarak proje geliştirildi. Tam testlerin soncunda proje Özgür yazılım olarak Git sistemi üzerinden erişime açılacaktır.
- Araç üzerindeki tüm kodlamalar Arduino IDE’si ile geliştirilmiştir. Nesneye Dayalı Programlama metodolojisi kullanılmıştır.
ihtiyaçları karşılanmıştır.
Otonomluk
- Araç güç verildikten sonra bluetooth aracılığıyla uzaktan bağlanılıldığında kullanıla bilmektedir. Proje kapsamında kullanılan RFID üzerinden yetki sistemi sürücü açısından otonomluğa zarar veriyor gibi gözükse de aslında çok sayıdaki stant görevlisinin yetkilendirilebilmesi açısından bakıldığında otonumluğa katkısı görülecektir.
- Aracın Ultrasonik sensorler ve bu sensorlerin yazılımsal olarak ileri-geri motor kontrolüne yani hız kademesine müdahalesi sayesinde ön ve arkadan olası çarpmalara karşı önce yavaşlatılması ve gerektiğinde durdurulması sureti ile korunması sağlanmıştır.
- Lcd panel aracılığıyla aracın durumu hakkında kullanıcıya anlık bilgi verilmektedir. Bu sayede cihaz bluetooth bağlantı durumu, stant görevlisi yetki durumu, aracın hızı ve yönü ile alakalı bilgiler kullanıcıya sunulmuştur.
Yenilikçilik
- Kumanda olarak akıllı telefonların kullanılması ve yine buton kontrolü yerine sensörler aracılığıyla kontrolün gerçekleştirilmesi.
- Uygulayarak öğrenme projesi olması.
Dayanıklılık
- Kullanılan modüllerin tamamı endüstriyel standartlarda fabrika üretimi modüller (kartlar) olup sadece kablolar aracılığıyla birbiriyle haberleştirilmiştir.
- Kablolamada tanıtım amaçlı olduğu için sabit kablolar yerine modüller arası bağlantı için özel tasarlanmış Jumperler kullanılmıştır.
- Dayanıklılığı sürdürülebilir kılmak için çarpmaya karşı sensörler ve yazılımsal iyileştirmeler aracığıyla önlemler alınmıştır.
- RC araç kullanmış olduğumuz projede çarpmalara karşı gerekli önlem alınmış olsa da araç tercih edilirken mümkün oluğunca dış ortam koşullarından: tümsek, engebeli zemin, gibi; etkilenmeyecek yüksek ve süspansiyonlu bir jip tercih edilmiştir.
Maliyet tablosu
| Adı | Kulanılan adet | Birim maliyet (TL) | Toplam maliyet (TL) |
| ATmega 2560 | 1 | 150 | 150 |
| HC-SR04 Ultrasonik mesafe sensoru | 2 | 10 | 20 |
| L298N Motor sürücülü kart | 1 | 16 | 16 |
| Servo motor | 1 | 9 | 9 |
| RC-Jip | 1 | 100 | 100 |
| RFID-RC522 | 1 | 20 | 20 |
| HC06 bluetooth modülü | 1 | 20 | 20 |
| Kablolama | – | 7 | |
| 1450 mA Lipo Pil | 1 | 80 | 80 |
| Toplam | 422 |
Basitlik
- Yön kontrolü için değiştirilen servo motorun uyumlaştırması dışında donanımsal olarak kartların kablolama ile birleştirilmesinin dışında bir zorluğu yoktur.
- Geliştirirmiş olan yazılımın sadece Araç üzerindeki Arduino Mega geliştirme kartına yüklenmesi gerekmektedir.
- Ziyaretçiler Google Play üzerinden yayınlayacağımız uygulamayı aratarak indirebilecekleri gibi broşürümüzde bulunan kare kod vasıtasıyla da indirebilecekleridir.
Uygulanabilirlik
- Donanımsal olarak piyasadan alınabilecek her türlü RC araca uygulanabilecek bir mimariye sahiptir. Kısa süreli bir çalışma sonucunda donanımsal olarak araç hazır hale getirilebilecektir.
- Nesneye dayalı programlama ile geliştirilmiş olan yazılım modüler olarak geliştirilmiştir. Birkaç parametre değiştirilerek farklı hız ve ebatlardaki araçlarda kullanılabilecek hale getirilebilmektedir.
Eğitim Katılımcıları ve Proje Ekibi:
Proje kapsamında Sakarya Üniversitesi Bilgisayar Mühendisliği bölümünden 7, Elektrik-Elektronik Mühendisliği Bölümünden 1, Mekatronik Mühendisliği Bölümünden 3 ve Makine Mühendisliği Bölümünden 1 kişi olmak üzere 12 kişilik bir ekip çalışmıştır. SAKARYA ÜNİVERSİTESİ SAURO topluluğu çatısı altında yapılmıştır.